Simple lane marking detection pipeline (Udacity nanodegree exercise - 2020)
Python, jupyter notebooks opencv, edge detection
Loading the image
Conversion to gray scale (for intensity filtering)
Filtering pixels with high values (separating white lane markings from Background)
Selecting a region of interest (cut out only area where our lane markings should be)
Edge detection with canny edge algorithm
Add Gaussian blur to smoothen and connect detected edges
Using hough transform to generate lines out of our detected edges
Extrapolate lines to solid lane boundarys that extend to the size of the ROI
Annotating detected lines as lane markings on input image
1. Input image
2. Image after grayscale conversion
3. Thresholded grayscale image
4. Cut out ROI (Region of interest)
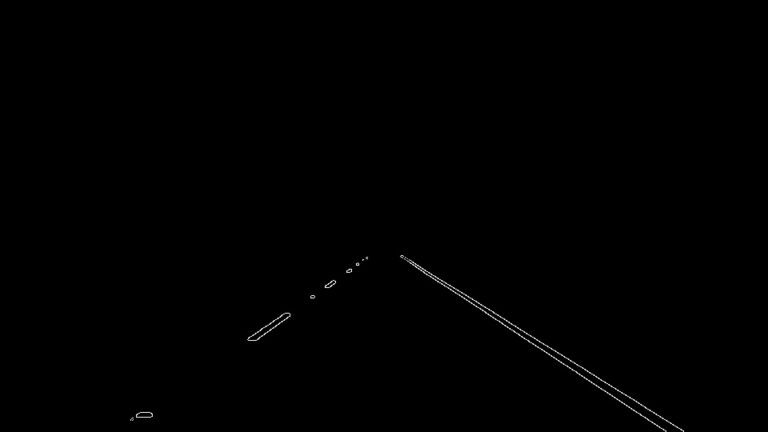
5. Image after canny edge detection
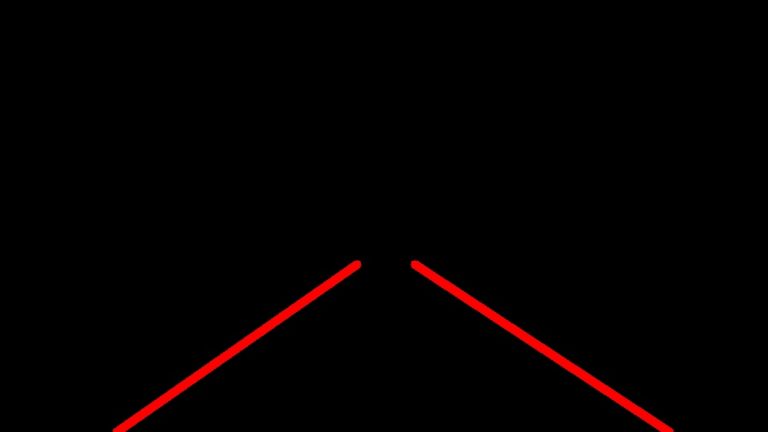
8. Extrapolated lines that depict lane markings
Project: Simple lane marking detection
Video: Simple lane detection pipeline
How did I implement it?
For the lane detection pipeline I used jupyter-notebooks to develop and visualize each step of the processing. It is programmed in python 3 and makes use of the image processing algorithms of the opencv library. If you are interested how each of the mentioned steps of this pipeline is implemented check out the project on my github. The project includes a writeup with more details about each processing step and the jupyter-notebook.
Advanced lane detection pipeline (Udacity nanodegree exercise - 2020)
Undistortion of the camera image: Compute the camera calibration matrix and distortion coefficients given a set of chessboard images. Then use these coefficients to apply the distortion correction to the raw images.
Use color transforms, gradients or other techniques, to create a thresholded binary image.
Apply a perspective transform to rectify the binary image. This results in a “birds-eye view” of the input image, which can be used for the detection of the lane markings.
Detect pixels of left and right lane markings and fit polynomial lines to represent the lane boundaries. The lane marking detection can be done either from scratch (4.1) or in a region based on prior found polylines (4.2).
Calculate the curvature of the lane and the vehicle position with respect to the lane center.
Warp the detected lane boundaries back onto the original image.
Output visual display of the lane boundaries and numerical estimation of lane curvature and vehicle position.
0. Camera Calibration
1. Original image
2. Binary image
3. Warped image ("birds-eye view")
3. Check if the warped ROI shows straight lines
4. Lane markings detection
4.1 Search for polyline from scratch
4.2 Search for polyline from prior
Machine Vision
Video: Advanced lane detection pipeline
How did I implement it?
For the advanced lane detection pipeline I used python 3. The implementation again uses image processing algorithms of the opencv library to realize some of the steps mentioned in the summary. If you are interested how each of the steps of this pipeline is implemented in detail check out the project on my github. The project includes a writeup with more details about each processing step according with images of each step.
Machine vision in matlab (Practical lab - 2016)
Matlab, machine vision basics
Machine vision lecture & practical exercises in matlab
Basic image manipulation: Filtering, dilation, erosion, color conversion, scaling etc.
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.OkOpt out third party cookiesPrivacy policy